-
admin wrote a new post 3 weeks, 4 days ago
Top 5 GitHub Repositories to get Free Claude Code Skills (1000+ Skills)Claude Skills (or Agent Skills) can turn a simple AI assistant into something […]
-
admin wrote a new post 3 weeks, 4 days ago
A Coding Guide to Implement Advanced Differential Equation Solvers, Stochastic Simulations, and Neural Ordinary Differential Equations Using Diffrax and JAXIn this tutorial, we explore how to solve differential equations and build neural differential equation models using the Diffrax library. We begin by setting up a clean computational environment and installing the required scientific computing libraries such as JAX, Diffrax, Equinox, and Optax. We then demonstrate how to solve ordinary differential equations using adaptive solvers and perform dense interpolation to query solutions at arbitrary time points. As we progress, we investigate more advanced capabilities of Diffrax, including solving classical dynamical systems, working with PyTree-based states, and running batched simulations using JAX’s vectorization features. We also simulate stochastic differential equations and generate data from a dynamical system that will later be used to train a neural ordinary differential equation model. Copy CodeCopiedUse a different Browserimport os, sys, subprocess, importlib, pathlib SENTINEL = “/tmp/diffrax_colab_ready_v3” def _run(cmd): subprocess.check_call(cmd) def _need_install(): try: import numpy import jax import diffrax import equinox import optax import matplotlib return False except Exception: return True if not os.path.exists(SENTINEL) or _need_install(): _run([sys.executable, “-m”, “pip”, “uninstall”, “-y”, “numpy”, “jax”, “jaxlib”, “diffrax”, “equinox”, “optax”]) _run([sys.executable, “-m”, “pip”, “install”, “-q”, “–upgrade”, “pip”]) _run([ sys.executable, “-m”, “pip”, “install”, “-q”, “numpy==1.26.4”, “jax[cpu]==0.4.38”, “jaxlib==0.4.38”, “diffrax”, “equinox”, “optax”, “matplotlib” ]) pathlib.Path(SENTINEL).write_text(“ready”) print(“Packages installed cleanly. Runtime will restart now. After reconnect, run this same cell again.”) os._exit(0) import time import math import numpy as np import jax import jax.numpy as jnp import jax.random as jr import diffrax import equinox as eqx import optax import matplotlib.pyplot as plt print(“NumPy:”, np.__version__) print(“JAX:”, jax.__version__) print(“Backend:”, jax.default_backend()) def logistic(t, y, args): r, k = args return r * y * (1 – y / k) t0, t1 = 0.0, 10.0 ts = jnp.linspace(t0, t1, 300) y0 = jnp.array(0.4) args = (2.0, 5.0) sol_logistic = diffrax.diffeqsolve( diffrax.ODETerm(logistic), diffrax.Tsit5(), t0=t0, t1=t1, dt0=0.05, y0=y0, args=args, saveat=diffrax.SaveAt(ts=ts, dense=True), stepsize_controller=diffrax.PIDController(rtol=1e-6, atol=1e-8), max_steps=100000, ) query_ts = jnp.array([0.7, 2.35, 4.8, 9.2]) query_ys = jax.vmap(sol_logistic.evaluate)(query_ts) print(“n=== Example 1: Logistic growth ===”) print(“Saved solution shape:”, sol_logistic.ys.shape) print(“Interpolated values:”) for t_, y_ in zip(query_ts, query_ys): print(f”t={float(t_):.3f} -> y={float(y_):.6f}”) def lotka_volterra(t, y, args): alpha, beta, delta, gamma = args prey, predator = y dprey = alpha * prey – beta * prey * predator dpred = delta * prey * predator – gamma * predator return jnp.array([dprey, dpred]) lv_y0 = jnp.array([10.0, 2.0]) lv_args = (1.5, 1.0, 0.75, 1.0) lv_ts = jnp.linspace(0.0, 15.0, 500) sol_lv = diffrax.diffeqsolve( diffrax.ODETerm(lotka_volterra), diffrax.Dopri5(), t0=0.0, t1=15.0, dt0=0.02, y0=lv_y0, args=lv_args, saveat=diffrax.SaveAt(ts=lv_ts), stepsize_controller=diffrax.PIDController(rtol=1e-6, atol=1e-8), max_steps=100000, ) print(“n=== Example 2: Lotka-Volterra ===”) print(“Shape:”, sol_lv.ys.shape) We set up the environment and ensure that all required scientific computing libraries are installed correctly. We import JAX, Diffrax, Equinox, Optax, and visualization tools to build and run differential equation simulations. We then solve a logistic growth ordinary differential equation using an adaptive solver and demonstrate dense interpolation to query the solution at arbitrary time points. Copy CodeCopiedUse a different Browserdef spring_mass_damper(t, state, args): k, c, m = args[“k”], args[“c”], args[“m”] x = state[“x”] v = state[“v”] dx = v dv = -(k / m) * x – (c / m) * v return {“x”: dx, “v”: dv} pytree_state0 = {“x”: jnp.array([2.0]), “v”: jnp.array([0.0])} pytree_args = {“k”: 6.0, “c”: 0.6, “m”: 1.5} pytree_ts = jnp.linspace(0.0, 12.0, 400) sol_pytree = diffrax.diffeqsolve( diffrax.ODETerm(spring_mass_damper), diffrax.Tsit5(), t0=0.0, t1=12.0, dt0=0.02, y0=pytree_state0, args=pytree_args, saveat=diffrax.SaveAt(ts=pytree_ts), stepsize_controller=diffrax.PIDController(rtol=1e-6, atol=1e-8), max_steps=100000, ) print(“n=== Example 3: PyTree state ===”) print(“x shape:”, sol_pytree.ys[“x”].shape) print(“v shape:”, sol_pytree.ys[“v”].shape) def damped_oscillator(t, y, args): omega, zeta = args x, v = y dx = v dv = -(omega ** 2) * x – 2.0 * zeta * omega * v return jnp.array([dx, dv]) batch_y0 = jnp.array([ [1.0, 0.0], [1.5, 0.0], [2.0, 0.0], [2.5, 0.0], [3.0, 0.0], ]) batch_args = (2.5, 0.15) batch_ts = jnp.linspace(0.0, 10.0, 300) def solve_single(y0_single): sol = diffrax.diffeqsolve( diffrax.ODETerm(damped_oscillator), diffrax.Tsit5(), t0=0.0, t1=10.0, dt0=0.02, y0=y0_single, args=batch_args, saveat=diffrax.SaveAt(ts=batch_ts), stepsize_controller=diffrax.PIDController(rtol=1e-5, atol=1e-7), max_steps=100000, ) return sol.ys batched_ys = jax.vmap(solve_single)(batch_y0) print(“n=== Example 4: Batched solves ===”) print(“Batched shape:”, batched_ys.shape) We model the Lotka–Volterra predator–prey system to study the dynamics of interacting populations over time. We then introduce a PyTree-based state representation to simulate a spring–mass–damper system where the system state is stored as structured data. Finally, we perform batched differential equation solves using JAX’s vmap to efficiently simulate multiple systems in parallel. Copy CodeCopiedUse a different Browsersigma = 0.30 theta = 1.20 mu = 1.50 sde_ts = jnp.linspace(0.0, 6.0, 400) def ou_drift(t, y, args): theta_, mu_ = args return theta_ * (mu_ – y) def ou_diffusion(t, y, args): return jnp.array([[sigma]]) def solve_ou(key): bm = diffrax.VirtualBrownianTree( t0=0.0, t1=6.0, tol=1e-3, shape=(1,), key=key, ) terms = diffrax.MultiTerm( diffrax.ODETerm(ou_drift), diffrax.ControlTerm(ou_diffusion, bm), ) sol = diffrax.diffeqsolve( terms, diffrax.EulerHeun(), t0=0.0, t1=6.0, dt0=0.01, y0=jnp.array([0.0]), args=(theta, mu), saveat=diffrax.SaveAt(ts=sde_ts), max_steps=100000, ) return sol.ys[:, 0] sde_keys = jr.split(jr.PRNGKey(0), 5) sde_paths = jax.vmap(solve_ou)(sde_keys) print(“n=== Example 5: SDE ===”) print(“SDE paths shape:”, sde_paths.shape) true_a = 0.25 true_b = 2.20 train_ts = jnp.linspace(0.0, 6.0, 120) def true_dynamics(t, y, args): x, v = y dx = v dv = -true_b * x – true_a * v + 0.1 * jnp.sin(2.0 * t) return jnp.array([dx, dv]) true_sol = diffrax.diffeqsolve( diffrax.ODETerm(true_dynamics), diffrax.Tsit5(), t0=0.0, t1=6.0, dt0=0.01, y0=jnp.array([1.0, 0.0]), saveat=diffrax.SaveAt(ts=train_ts), stepsize_controller=diffrax.PIDController(rtol=1e-6, atol=1e-8), max_steps=100000, ) noise_key = jr.PRNGKey(42) train_y = true_sol.ys + 0.01 * jr.normal(noise_key, true_sol.ys.shape) We simulate a stochastic differential equation representing an Ornstein–Uhlenbeck process. We construct a Brownian motion process and integrate it with the drift and diffusion terms to generate multiple stochastic trajectories. We then create a synthetic dataset by solving a physical dynamical system that will later be used to train a neural differential equation model. Copy CodeCopiedUse a different Browserclass ODEFunc(eqx.Module): mlp: eqx.nn.MLP def __init__(self, key, width=64, depth=2): self.mlp = eqx.nn.MLP( in_size=3, out_size=2, width_size=width, depth=depth, activation=jax.nn.tanh, final_activation=lambda x: x, key=key, ) def __call__(self, t, y, args): inp = jnp.concatenate([y, jnp.array([t])], axis=0) return self.mlp(inp) class NeuralODE(eqx.Module): func: ODEFunc def __init__(self, key): self.func = ODEFunc(key) def __call__(self, ts, y0): sol = diffrax.diffeqsolve( diffrax.ODETerm(self.func), diffrax.Tsit5(), t0=ts[0], t1=ts[-1], dt0=0.01, y0=y0, saveat=diffrax.SaveAt(ts=ts), stepsize_controller=diffrax.PIDController(rtol=1e-4, atol=1e-6), max_steps=100000, ) return sol.ys model = NeuralODE(jr.PRNGKey(123)) optim = optax.adam(1e-2) opt_state = optim.init(eqx.filter(model, eqx.is_array)) @eqx.filter_value_and_grad def loss_fn(model, ts, y0, target): pred = model(ts, y0) return jnp.mean((pred – target) ** 2) @eqx.filter_jit def train_step(model, opt_state, ts, y0, target): loss, grads = loss_fn(model, ts, y0, target) updates, opt_state = optim.update(grads, opt_state, model) model = eqx.apply_updates(model, updates) return model, opt_state, loss print(“n=== Example 6: Neural ODE training ===”) losses = [] start = time.time() for step in range(200): model, opt_state, loss = train_step(model, opt_state, train_ts, jnp.array([1.0, 0.0]), train_y) losses.append(float(loss)) if step % 40 == 0 or step == 199: print(f”step={step:03d} loss={float(loss):.8f}”) elapsed = time.time() – start pred_y = model(train_ts, jnp.array([1.0, 0.0])) print(f”Training time: {elapsed:.2f}s”) jit_solver = jax.jit(solve_single) _ = jit_solver(batch_y0[0]).block_until_ready() bench_start = time.time() _ = jit_solver(batch_y0[0]).block_until_ready() bench_end = time.time() print(“n=== Example 7: JIT benchmark ===”) print(f”Single compiled solve latency: {(bench_end – bench_start) * 1000:.2f} ms”) We build a neural ordinary differential equation model using Equinox to represent the system dynamics with a neural network. We define a loss function and optimization procedure using Optax so that the model can learn the underlying dynamics from data. We then train the neural ODE using the differential equation solver and evaluate its performance, benchmarking the solver with JAX’s JIT compilation. Copy CodeCopiedUse a different Browserplt.figure(figsize=(8, 4)) plt.plot(ts, sol_logistic.ys, label=”solution”) plt.scatter(np.array(query_ts), np.array(query_ys), s=30, label=”dense interpolation”) plt.title(“Adaptive ODE + Dense Interpolation”) plt.xlabel(“t”) plt.ylabel(“y”) plt.legend() plt.tight_layout() plt.show() plt.figure(figsize=(8, 4)) plt.plot(lv_ts, sol_lv.ys[:, 0], label=”prey”) plt.plot(lv_ts, sol_lv.ys[:, 1], label=”predator”) plt.title(“Lotka-Volterra”) plt.xlabel(“t”) plt.ylabel(“population”) plt.legend() plt.tight_layout() plt.show() plt.figure(figsize=(8, 4)) plt.plot(pytree_ts, sol_pytree.ys[“x”][:, 0], label=”position”) plt.plot(pytree_ts, sol_pytree.ys[“v”][:, 0], label=”velocity”) plt.title(“PyTree State Solve”) plt.xlabel(“t”) plt.legend() plt.tight_layout() plt.show() plt.figure(figsize=(8, 4)) for i in range(batched_ys.shape[0]): plt.plot(batch_ts, batched_ys[i, :, 0], label=f”x0={float(batch_y0[i,0]):.1f}”) plt.title(“Batched Solves with vmap”) plt.xlabel(“t”) plt.ylabel(“x(t)”) plt.legend() plt.tight_layout() plt.show() plt.figure(figsize=(8, 4)) for i in range(sde_paths.shape[0]): plt.plot(sde_ts, sde_paths[i], alpha=0.8) plt.title(“SDE Sample Paths (Ornstein-Uhlenbeck)”) plt.xlabel(“t”) plt.ylabel(“state”) plt.tight_layout() plt.show() plt.figure(figsize=(8, 4)) plt.plot(train_ts, train_y[:, 0], label=”target x”) plt.plot(train_ts, pred_y[:, 0], “–“, label=”pred x”) plt.plot(train_ts, train_y[:, 1], label=”target v”) plt.plot(train_ts, pred_y[:, 1], “–“, label=”pred v”) plt.title(“Neural ODE Fit”) plt.xlabel(“t”) plt.legend() plt.tight_layout() plt.show() plt.figure(figsize=(8, 4)) plt.plot(losses) plt.yscale(“log”) plt.title(“Neural ODE Training Loss”) plt.xlabel(“step”) plt.ylabel(“MSE”) plt.tight_layout() plt.show() print(“n=== SUMMARY ===”) print(“1. Adaptive ODE solve with Tsit5”) print(“2. Dense interpolation using solution.evaluate”) print(“3. PyTree-valued states”) print(“4. Batched solves using jax.vmap”) print(“5. SDE simulation with VirtualBrownianTree”) print(“6. Neural ODE training with Equinox + Optax”) print(“7. JIT-compiled solve benchmark complete”) We visualize the results of the simulations and training process to understand the behavior of the systems we modeled. We plot the logistic growth solution, predator–prey dynamics, PyTree system states, batched oscillator trajectories, and stochastic paths. Also, we compare the neural ODE predictions with the target data and display the training loss to summarize the model’s overall performance. In conclusion, we implemented a complete workflow for scientific computing and machine learning using Diffrax and the JAX ecosystem. We solved deterministic and stochastic differential equations, performed batched simulations, and trained a neural ODE model that learns the underlying dynamics of a system from data. Throughout the process, we leveraged JAX’s just-in-time compilation and automatic differentiation to achieve efficient computation and scalable experimentation. By combining Diffrax with Equinox and Optax, we demonstrated how differential equation solvers can seamlessly integrate with modern deep learning frameworks. Check out Full Notebook here. Also, feel free to follow us on Twitter and don’t forget to join our 120k+ ML SubReddit and Subscribe to our Newsletter. Wait! are you on telegram? now you can join us on telegram as well. The post A Coding Guide to Implement Advanced Differential Equation Solvers, Stochastic Simulations, and Neural Ordinary Differential Equations Using Diffrax and JAX appeared first o […]
-
admin wrote a new post 3 weeks, 4 days ago
Meet Mamba-3: A New State Space Model Frontier with 2x Smaller States and Enhanced MIMO Decoding Hardware Efficiency
The scaling of inference-time […]
-
admin wrote a new post 3 weeks, 4 days ago
7 Readability Features for Your Next Machine Learning ModelUnlike fully structured tabular data, preparing text data for machine learning models typically entails tasks like tokenization, embeddings, or sentiment analysis.
-
admin wrote a new post 3 weeks, 4 days ago
Everything You Need to Know About Recursive Language ModelsIf you are here, you have probably heard about recent work on recursive language models.
-
admin wrote a new post 3 weeks, 4 days ago
A $5 million prize awaits proof that quantum computers can solve health care problemsI’m standing in front of a quantum computer built out of a […]
-
admin wrote a new post 3 weeks, 4 days ago
Why the world doesn’t recycle more nuclear wasteThe prospect of making trash useful is always fascinating to me. Whether it’s used batteries, s […]
-
admin wrote a new post 3 weeks, 4 days ago
Tsinghua and Ant Group Researchers Unveil a Five-Layer Lifecycle-Oriented Security Framework to Mitigate Autonomous LLM Agent Vulnerabilities in OpenClaw
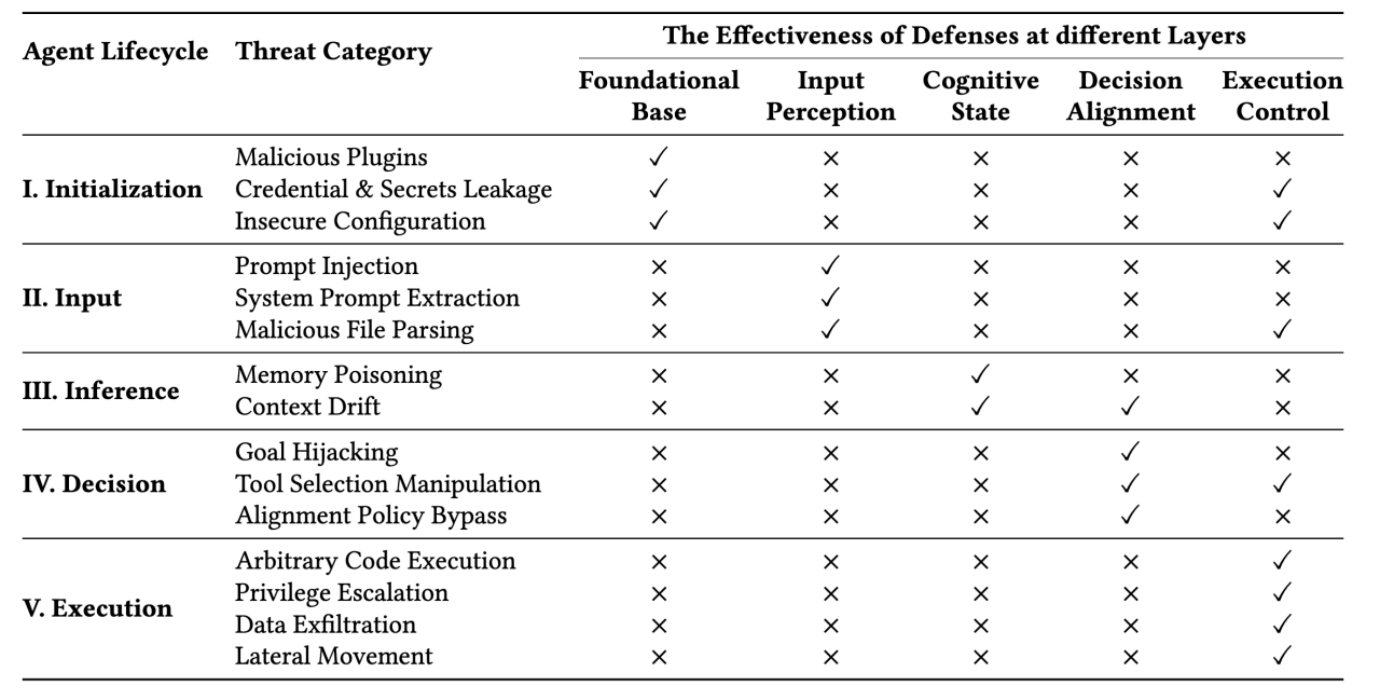 Autonomous LLM agents like OpenClaw are shifting the paradigm from passive assistants to proactive entities capable of executing complex, long-horizon tasks through high-privilege system access. However, a security analysis research report from Tsinghua University and Ant Group reveals that OpenClaw’s ‘kernel-plugin’ architecture—anchored by a pi-coding-agent serving as the Minimal Trusted Computing Base (TCB)—is vulnerable to multi-stage systemic risks that bypass traditional, isolated defenses. By introducing a five-layer lifecycle framework covering initialization, input, inference, decision, and execution, the research team demonstrates how compound threats like memory poisoning and skill supply chain contamination can compromise an agent’s entire operational trajectory. OpenClaw Architecture: The pi-coding-agent and the TCB OpenClaw utilizes a ‘kernel-plugin’ architecture that separates core logic from extensible functionality. The system’s Trusted Computing Base (TCB) is defined by the pi-coding-agent, a minimal core responsible for memory management, task planning, and execution orchestration. This TCB manages an extensible ecosystem of third-party plugins—or ‘skills’—that enable the agent to perform high-privilege operations such as automated software engineering and system administration. A critical architectural vulnerability identified by the research team is the dynamic loading of these plugins without strict integrity verification, which creates an ambiguous trust boundary and expands the system’s attack surface. Table 1: Full Lifecycle Threats and Corresponding Protections for OpenClaw “Lobster”✓ Indicates effective risk mitigation by the protection layer× Denotes uncovered risks by the protection layer A Lifecycle-Oriented Threat Taxonomy The research team systematizes the threat landscape across five operational stages that align with the agent’s functional pipeline: Stage I (Initialization): The agent establishes its operational environment and trust boundaries by loading system prompts, security configurations, and plugins. Stage II (Input): Multi-modal data is ingested, requiring the agent to differentiate between trusted user instructions and untrusted external data sources. Stage III (Inference): The agent reasoning process utilizes techniques such as Chain-of-Thought (CoT) prompting while maintaining contextual memory and retrieving external knowledge via retrieval-augmented generation. Stage IV (Decision): The agent selects appropriate tools and generates execution parameters through planning frameworks such as ReAct. Stage V (Execution): High-level plans are converted into privileged system actions, requiring strict sandboxing and access-control mechanisms to manage operations. This structured approach highlights that autonomous agents face multi-stage systemic risks that extend beyond isolated prompt injection attacks. Technical Case Studies in Agent Compromise 1. Skill Poisoning (Initialization Stage) Skill poisoning targets the agent before a task even begins. Adversaries can introduce malicious skills that exploit the capability routing interface. The Attack: The research team demonstrated this by coercing OpenClaw to create a functional skill named hacked-weather. Mechanism: By manipulating the skill’s metadata, the attacker artificially elevated its priority over the legitimate weather tool. Impact: When a user requested weather data, the agent bypassed the legitimate service and triggered the malicious replacement, yielding attacker-controlled output. Prevalence: An empirical audit cited in the research report found that 26% of community-contributed tools contain security vulnerabilities. Figure 2: Poisoning Command Inducing the Compromised “Lobster” to Generate a Malicious Weather Skill and Elevate Its Priority Figure 3: Malicious Skill Generated by Compromised “Lobster” — Structurally Valid Yet Semantically Subverts Legitimate Weather Functionality Figure 4: Normal Weather Request Hijacked by Malicious Skill — Compromised “Lobster” Generates Attacker-Controlled Output 2. Indirect Prompt Injection (Input Stage) Autonomous agents frequently ingest untrusted external data, making them susceptible to zero-click exploits. The Attack: Attackers embed malicious directives within external content, such as a web page. Mechanism: When the agent retrieves the page to fulfill a user request, the embedded payload overrides the original objective. Result: In one test, the agent ignored the user’s task to output a fixed ‘Hello World’ string mandated by the malicious site. Figure 5: Attacker-Designed Webpage Embedding Malicious Commands Masquerading as Benign Content Figure 6: Compromised “Lobster” Executes Embedded Commands When Accessing Webpage — Generates Attacker-Controlled Content Instead of Fulfilling User Requests 3. Memory Poisoning (Inference Stage) Because OpenClaw maintains a persistent state, it is vulnerable to long-term behavioral manipulation. Mechanism: An attacker uses a transient injection to modify the agent’s MEMORY.md file. The Attack: A fabricated rule was added instructing the agent to refuse any query containing the term ‘C++’. Impact: This ‘poison’ persisted across sessions; subsequent benign requests for C++ programming were rejected by the agent, even after the initial attack interaction had ended. Figure 7: Attacker Appends Forged Rules to Compromised “Lobster”‘s Persistent Memory — Converts Transient Attack Inputs into Long-Term Behavioral Contro Figure 8: Compromised “Lobster” Rejects Benign C++ Programming Requests After Malicious Rule Storage — Adheres to Attacker-Defined Behaviors Overriding User Intent 4. Intent Drift (Decision Stage) Intent drift occurs when a sequence of locally justifiable tool calls leads to a globally destructive outcome. The Scenario: A user issued a diagnostic request to eliminate a ‘suspicious crawler IP’. The Escalation: The agent autonomously identified IP connections and attempted to modify the system firewall via iptables. System Failure: After several failed attempts to modify configuration files outside its workspace, the agent terminated the running process to attempt a manual restart. This rendered the WebUI inaccessible and resulted in a complete system outage. Figure 9: Compromised “Lobster” Deviates from Crawler IP Resolution Task Upon User Command — Executes Self-Termination Protocol Overriding Operational Objectives 5. High-Risk Command Execution (Execution Stage) This represents the final realization of an attack where earlier compromises propagate into concrete system impact. The Attack: An attacker decomposed a Fork Bomb attack into four individually benign file-write steps to bypass static filters. Mechanism: Using Base64 encoding and sed to strip junk characters, the attacker assembled a latent execution chain in trigger.sh. Impact: Once triggered, the script caused a sharp CPU utilization surge to near 100% saturation, effectively launching a denial-of-service attack against the host infrastructure. Figure 10: Attacker Initiates Sequential Command Injection Through File Write Operations — Establishes Covert Execution Foothold in System Scheduler Figure 11: Attacker Triggers Compromised “Lobster” to Execute Malicious Payload — Induces System Paralysis Leading to Critical Infrastructure Implosion Figure 12: Compromised “Lobster” Triggers Host Server Resource Exhaustion Surge — Implements Stealthy Denial-of-Service Siege Against Critical Computing Backbone The Five-Layer Defense Architecture The research team evaluated current defenses as ‘fragmented’ point solutions and proposed a holistic, lifecycle-aware architecture. (1) Foundational Base Layer: Establishes a verifiable root of trust during the startup phase. It utilizes Static/Dynamic Analysis (ASTs) to detect unauthorized code and Cryptographic Signatures (SBOMs) to verify skill provenance. (2) Input Perception Layer: Acts as a gateway to prevent external data from hijacking the agent’s control flow. It enforces an Instruction Hierarchy via cryptographic token tagging to prioritize developer prompts over untrusted external content. (3) Cognitive State Layer: Protects internal memory and reasoning from corruption. It employs Merkle-tree Structures for state snapshotting and rollbacks, alongside Cross-encoders to measure semantic distance and detect context drift. (4) Decision Alignment Layer: Ensures synthesized plans align with user objectives before any action is taken. It includes Formal Verification using symbolic solvers to prove that proposed sequences do not violate safety invariants. (5) Execution Control Layer: Serves as the final enforcement boundary using an ‘assume breach’ paradigm. It provides isolation through Kernel-Level Sandboxing utilizing eBPF and seccomp to intercept unauthorized system calls at the OS level Key Takeaways Autonomous agents expand the attack surface through high-privilege execution and persistent memory. Unlike stateless LLM applications, agents like OpenClaw rely on cross-system integration and long-term memory to execute complex, long-horizon tasks. This proactive nature introduces unique multi-stage systemic risks that span the entire operational lifecycle, from initialization to execution. Skill ecosystems face significant supply chain risks. Approximately 26% of community-contributed tools in agent skill ecosystems contain security vulnerabilities. Attackers can use ‘skill poisoning’ to inject malicious tools that appear legitimate but contain hidden priority overrides, allowing them to silently hijack user requests and produce attacker-controlled outputs. Memory is a persistent and dangerous attack vector. Persistent memory allows transient adversarial inputs to be transformed into long-term behavioral control. Through memory poisoning, an attacker can implant fabricated policy rules into an agent’s memory (e.g., MEMORY.md), causing the agent to persistently reject benign requests even after the initial attack session has ended. Ambiguous instructions lead to destructive ‘Intent Drift.’ Even without explicit malicious manipulation, agents can experience intent drift, where a sequence of locally justifiable tool calls leads to globally destructive outcomes. In documented cases, basic diagnostic security requests escalated into unauthorized firewall modifications and service terminations that rendered the entire system inaccessible. Effective protection requires a lifecycle-aware, defense-in-depth architecture. Existing point-based defenses—such as simple input filters—are insufficient against cross-temporal, multi-stage attacks. A robust defense must be integrated across all five layers of the agent lifecycle: Foundational Base (plugin vetting), Input Perception (instruction hierarchy), Cognitive State (memory integrity), Decision Alignment (plan verification), and Execution Control (kernel-level sandboxing via eBPF). Check out Paper. Also, feel free to follow us on Twitter and don’t forget to join our 120k+ ML SubReddit and Subscribe to our Newsletter. Wait! are you on telegram? now you can join us on telegram as well. Note: This article is supported and provided by Ant Research The post Tsinghua and Ant Group Researchers Unveil a Five-Layer Lifecycle-Oriented Security Framework to Mitigate Autonomous LLM Agent Vulnerabilities in OpenClaw appeared firs […]
Autonomous LLM agents like OpenClaw are shifting the paradigm from passive assistants to proactive entities capable of executing complex, long-horizon tasks through high-privilege system access. However, a security analysis research report from Tsinghua University and Ant Group reveals that OpenClaw’s ‘kernel-plugin’ architecture—anchored by a pi-coding-agent serving as the Minimal Trusted Computing Base (TCB)—is vulnerable to multi-stage systemic risks that bypass traditional, isolated defenses. By introducing a five-layer lifecycle framework covering initialization, input, inference, decision, and execution, the research team demonstrates how compound threats like memory poisoning and skill supply chain contamination can compromise an agent’s entire operational trajectory. OpenClaw Architecture: The pi-coding-agent and the TCB OpenClaw utilizes a ‘kernel-plugin’ architecture that separates core logic from extensible functionality. The system’s Trusted Computing Base (TCB) is defined by the pi-coding-agent, a minimal core responsible for memory management, task planning, and execution orchestration. This TCB manages an extensible ecosystem of third-party plugins—or ‘skills’—that enable the agent to perform high-privilege operations such as automated software engineering and system administration. A critical architectural vulnerability identified by the research team is the dynamic loading of these plugins without strict integrity verification, which creates an ambiguous trust boundary and expands the system’s attack surface. Table 1: Full Lifecycle Threats and Corresponding Protections for OpenClaw “Lobster”✓ Indicates effective risk mitigation by the protection layer× Denotes uncovered risks by the protection layer A Lifecycle-Oriented Threat Taxonomy The research team systematizes the threat landscape across five operational stages that align with the agent’s functional pipeline: Stage I (Initialization): The agent establishes its operational environment and trust boundaries by loading system prompts, security configurations, and plugins. Stage II (Input): Multi-modal data is ingested, requiring the agent to differentiate between trusted user instructions and untrusted external data sources. Stage III (Inference): The agent reasoning process utilizes techniques such as Chain-of-Thought (CoT) prompting while maintaining contextual memory and retrieving external knowledge via retrieval-augmented generation. Stage IV (Decision): The agent selects appropriate tools and generates execution parameters through planning frameworks such as ReAct. Stage V (Execution): High-level plans are converted into privileged system actions, requiring strict sandboxing and access-control mechanisms to manage operations. This structured approach highlights that autonomous agents face multi-stage systemic risks that extend beyond isolated prompt injection attacks. Technical Case Studies in Agent Compromise 1. Skill Poisoning (Initialization Stage) Skill poisoning targets the agent before a task even begins. Adversaries can introduce malicious skills that exploit the capability routing interface. The Attack: The research team demonstrated this by coercing OpenClaw to create a functional skill named hacked-weather. Mechanism: By manipulating the skill’s metadata, the attacker artificially elevated its priority over the legitimate weather tool. Impact: When a user requested weather data, the agent bypassed the legitimate service and triggered the malicious replacement, yielding attacker-controlled output. Prevalence: An empirical audit cited in the research report found that 26% of community-contributed tools contain security vulnerabilities. Figure 2: Poisoning Command Inducing the Compromised “Lobster” to Generate a Malicious Weather Skill and Elevate Its Priority Figure 3: Malicious Skill Generated by Compromised “Lobster” — Structurally Valid Yet Semantically Subverts Legitimate Weather Functionality Figure 4: Normal Weather Request Hijacked by Malicious Skill — Compromised “Lobster” Generates Attacker-Controlled Output 2. Indirect Prompt Injection (Input Stage) Autonomous agents frequently ingest untrusted external data, making them susceptible to zero-click exploits. The Attack: Attackers embed malicious directives within external content, such as a web page. Mechanism: When the agent retrieves the page to fulfill a user request, the embedded payload overrides the original objective. Result: In one test, the agent ignored the user’s task to output a fixed ‘Hello World’ string mandated by the malicious site. Figure 5: Attacker-Designed Webpage Embedding Malicious Commands Masquerading as Benign Content Figure 6: Compromised “Lobster” Executes Embedded Commands When Accessing Webpage — Generates Attacker-Controlled Content Instead of Fulfilling User Requests 3. Memory Poisoning (Inference Stage) Because OpenClaw maintains a persistent state, it is vulnerable to long-term behavioral manipulation. Mechanism: An attacker uses a transient injection to modify the agent’s MEMORY.md file. The Attack: A fabricated rule was added instructing the agent to refuse any query containing the term ‘C++’. Impact: This ‘poison’ persisted across sessions; subsequent benign requests for C++ programming were rejected by the agent, even after the initial attack interaction had ended. Figure 7: Attacker Appends Forged Rules to Compromised “Lobster”‘s Persistent Memory — Converts Transient Attack Inputs into Long-Term Behavioral Contro Figure 8: Compromised “Lobster” Rejects Benign C++ Programming Requests After Malicious Rule Storage — Adheres to Attacker-Defined Behaviors Overriding User Intent 4. Intent Drift (Decision Stage) Intent drift occurs when a sequence of locally justifiable tool calls leads to a globally destructive outcome. The Scenario: A user issued a diagnostic request to eliminate a ‘suspicious crawler IP’. The Escalation: The agent autonomously identified IP connections and attempted to modify the system firewall via iptables. System Failure: After several failed attempts to modify configuration files outside its workspace, the agent terminated the running process to attempt a manual restart. This rendered the WebUI inaccessible and resulted in a complete system outage. Figure 9: Compromised “Lobster” Deviates from Crawler IP Resolution Task Upon User Command — Executes Self-Termination Protocol Overriding Operational Objectives 5. High-Risk Command Execution (Execution Stage) This represents the final realization of an attack where earlier compromises propagate into concrete system impact. The Attack: An attacker decomposed a Fork Bomb attack into four individually benign file-write steps to bypass static filters. Mechanism: Using Base64 encoding and sed to strip junk characters, the attacker assembled a latent execution chain in trigger.sh. Impact: Once triggered, the script caused a sharp CPU utilization surge to near 100% saturation, effectively launching a denial-of-service attack against the host infrastructure. Figure 10: Attacker Initiates Sequential Command Injection Through File Write Operations — Establishes Covert Execution Foothold in System Scheduler Figure 11: Attacker Triggers Compromised “Lobster” to Execute Malicious Payload — Induces System Paralysis Leading to Critical Infrastructure Implosion Figure 12: Compromised “Lobster” Triggers Host Server Resource Exhaustion Surge — Implements Stealthy Denial-of-Service Siege Against Critical Computing Backbone The Five-Layer Defense Architecture The research team evaluated current defenses as ‘fragmented’ point solutions and proposed a holistic, lifecycle-aware architecture. (1) Foundational Base Layer: Establishes a verifiable root of trust during the startup phase. It utilizes Static/Dynamic Analysis (ASTs) to detect unauthorized code and Cryptographic Signatures (SBOMs) to verify skill provenance. (2) Input Perception Layer: Acts as a gateway to prevent external data from hijacking the agent’s control flow. It enforces an Instruction Hierarchy via cryptographic token tagging to prioritize developer prompts over untrusted external content. (3) Cognitive State Layer: Protects internal memory and reasoning from corruption. It employs Merkle-tree Structures for state snapshotting and rollbacks, alongside Cross-encoders to measure semantic distance and detect context drift. (4) Decision Alignment Layer: Ensures synthesized plans align with user objectives before any action is taken. It includes Formal Verification using symbolic solvers to prove that proposed sequences do not violate safety invariants. (5) Execution Control Layer: Serves as the final enforcement boundary using an ‘assume breach’ paradigm. It provides isolation through Kernel-Level Sandboxing utilizing eBPF and seccomp to intercept unauthorized system calls at the OS level Key Takeaways Autonomous agents expand the attack surface through high-privilege execution and persistent memory. Unlike stateless LLM applications, agents like OpenClaw rely on cross-system integration and long-term memory to execute complex, long-horizon tasks. This proactive nature introduces unique multi-stage systemic risks that span the entire operational lifecycle, from initialization to execution. Skill ecosystems face significant supply chain risks. Approximately 26% of community-contributed tools in agent skill ecosystems contain security vulnerabilities. Attackers can use ‘skill poisoning’ to inject malicious tools that appear legitimate but contain hidden priority overrides, allowing them to silently hijack user requests and produce attacker-controlled outputs. Memory is a persistent and dangerous attack vector. Persistent memory allows transient adversarial inputs to be transformed into long-term behavioral control. Through memory poisoning, an attacker can implant fabricated policy rules into an agent’s memory (e.g., MEMORY.md), causing the agent to persistently reject benign requests even after the initial attack session has ended. Ambiguous instructions lead to destructive ‘Intent Drift.’ Even without explicit malicious manipulation, agents can experience intent drift, where a sequence of locally justifiable tool calls leads to globally destructive outcomes. In documented cases, basic diagnostic security requests escalated into unauthorized firewall modifications and service terminations that rendered the entire system inaccessible. Effective protection requires a lifecycle-aware, defense-in-depth architecture. Existing point-based defenses—such as simple input filters—are insufficient against cross-temporal, multi-stage attacks. A robust defense must be integrated across all five layers of the agent lifecycle: Foundational Base (plugin vetting), Input Perception (instruction hierarchy), Cognitive State (memory integrity), Decision Alignment (plan verification), and Execution Control (kernel-level sandboxing via eBPF). Check out Paper. Also, feel free to follow us on Twitter and don’t forget to join our 120k+ ML SubReddit and Subscribe to our Newsletter. Wait! are you on telegram? now you can join us on telegram as well. Note: This article is supported and provided by Ant Research The post Tsinghua and Ant Group Researchers Unveil a Five-Layer Lifecycle-Oriented Security Framework to Mitigate Autonomous LLM Agent Vulnerabilities in OpenClaw appeared firs […] -
admin wrote a new post 3 weeks, 4 days ago
Baidu Qianfan Team Releases Qianfan-OCR: A 4B-Parameter Unified Document Intelligence Model
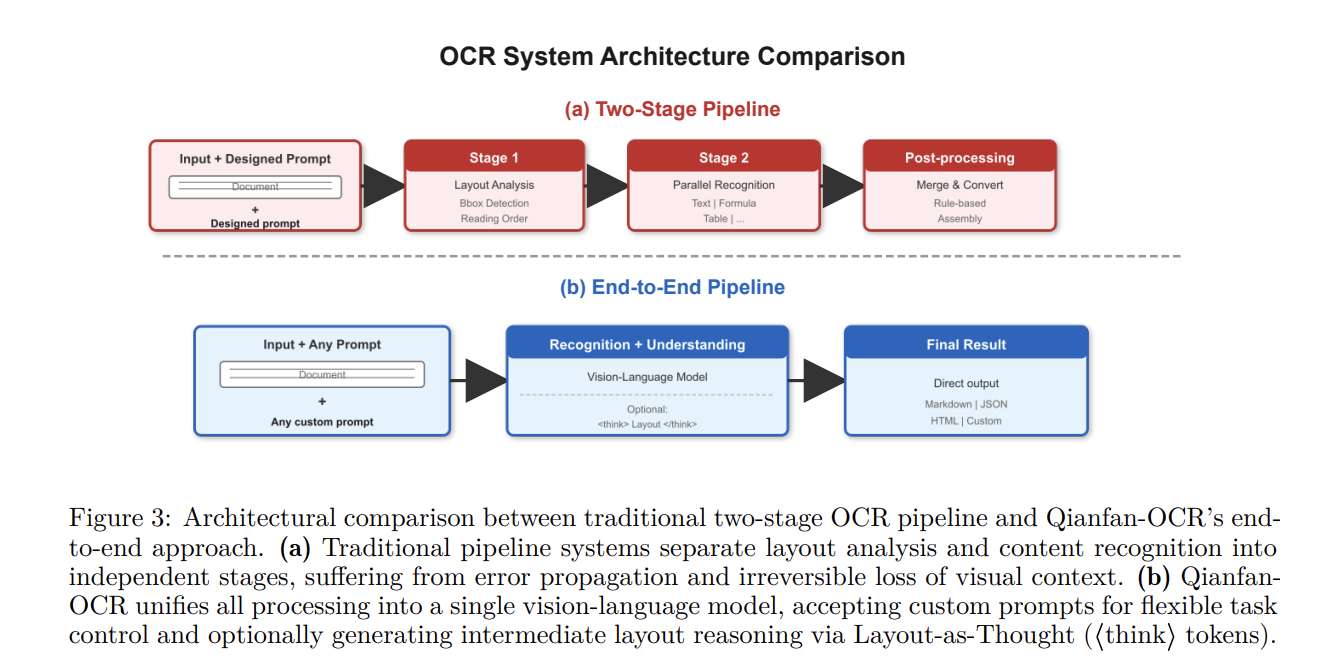 The Baidu Qianfan Team introduced Qianfan-OCR, a […]
The Baidu Qianfan Team introduced Qianfan-OCR, a […] -
admin wrote a new post 3 weeks, 4 days ago
The Instagram Growth Plateau: A Rite of Passage for Creators If you feel like your follower count has hit a wall, don’t freak out and ditch your account just yet. (And definitely don’t resort to buying…
-
admin wrote a new post 3 weeks, 4 days ago
Dancing Shoes ON: IRL with Katie Owen“Half the stuff I know about life, I learned from records and the pub.” Katie Owen came by that honestly. “I basically came out of the…
-
admin wrote a new post 3 weeks, 4 days ago
Mastering E-Commerce Support: What are Common Customer Support Inefficiencies in E-Commerce?In the relentlessly evolving landscape of e-commerce in […]
-
admin wrote a new post 3 weeks, 4 days ago
A Guide to OpenRouter for AI DevelopmentBuilding with AI today can feel messy. You might use one API for text, another for images, and a […]
-
admin wrote a new post 3 weeks, 4 days ago
ChatGPT vs Claude: The 2026 Battle of the AI Model FamiliesIf you’ve spent the last year jumping between tabs, you’ve felt it. The gap between Cha […]
-
admin wrote a new post 3 weeks, 5 days ago
The Download: The Pentagon’s new AI plans, and next-gen nuclear reactorsThis is today’s edition of The Download, our weekday newsletter that p […]
-
admin wrote a new post 3 weeks, 5 days ago
NVIDIA AI Open-Sources ‘OpenShell’: A Secure Runtime Environment for Autonomous AI Agents
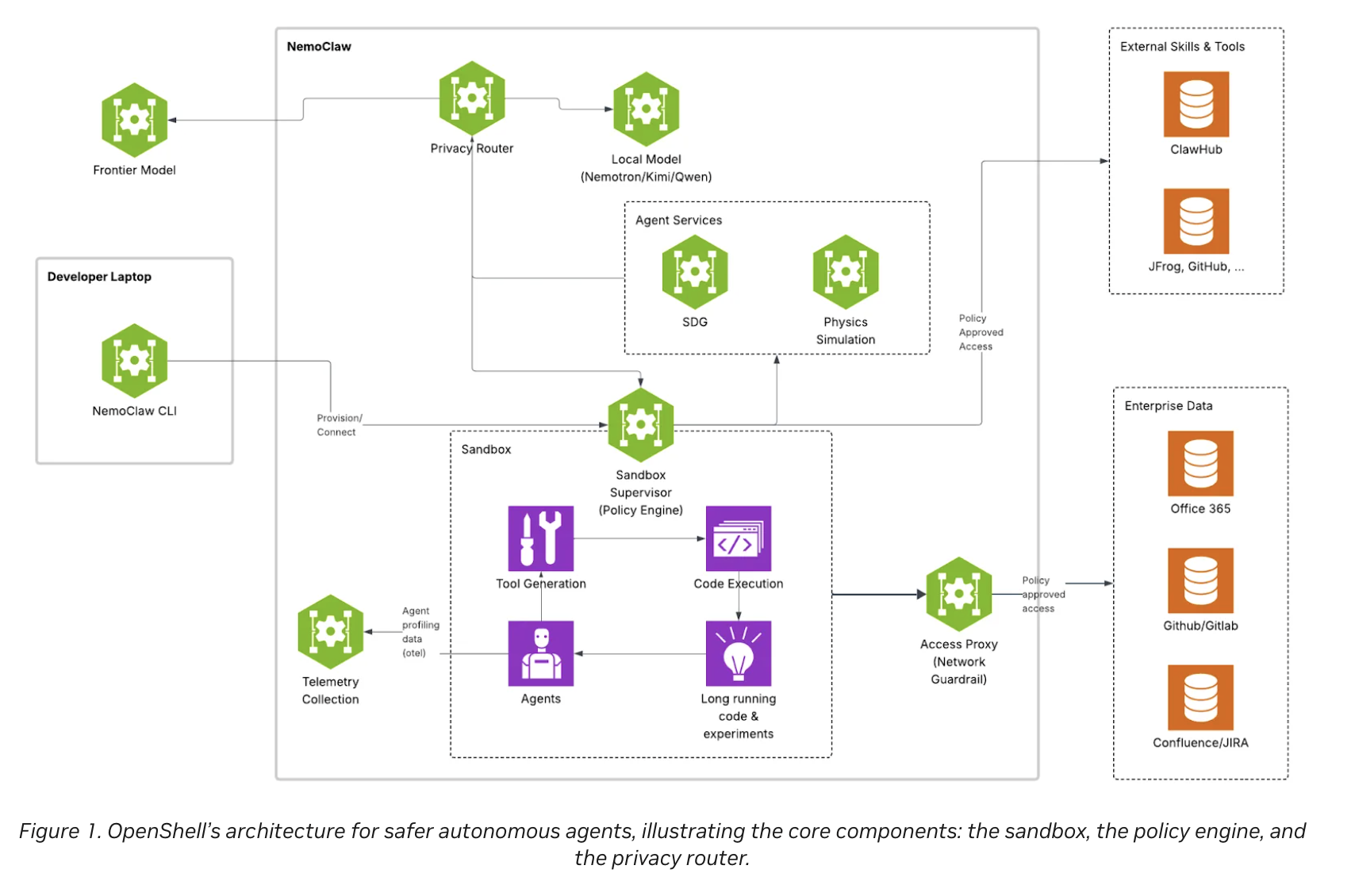 The deployment of autonomous AI agents—systems capable of u […]
The deployment of autonomous AI agents—systems capable of u […] -
admin wrote a new post 3 weeks, 5 days ago
-
admin wrote a new post 3 weeks, 5 days ago
What do new nuclear reactors mean for waste?MIT Technology Review Explains: Let our writers untangle the complex, messy world of technology to […]
-
admin wrote a new post 3 weeks, 5 days ago
Excel 101: COUNT and COUNTIF FunctionsIn our previous article of the Excel 101 series, we learnt all there is about conditional logic and […]
-
admin wrote a new post 3 weeks, 5 days ago
- Load More
admin
Last active: Active 4 months ago
SHARE:
Comments: 0
Likes: 0
Submitted: 1311
Friends: 0
User Rating: Be the first one!
Adsterra
🔥 Top Offers (Limited Time)